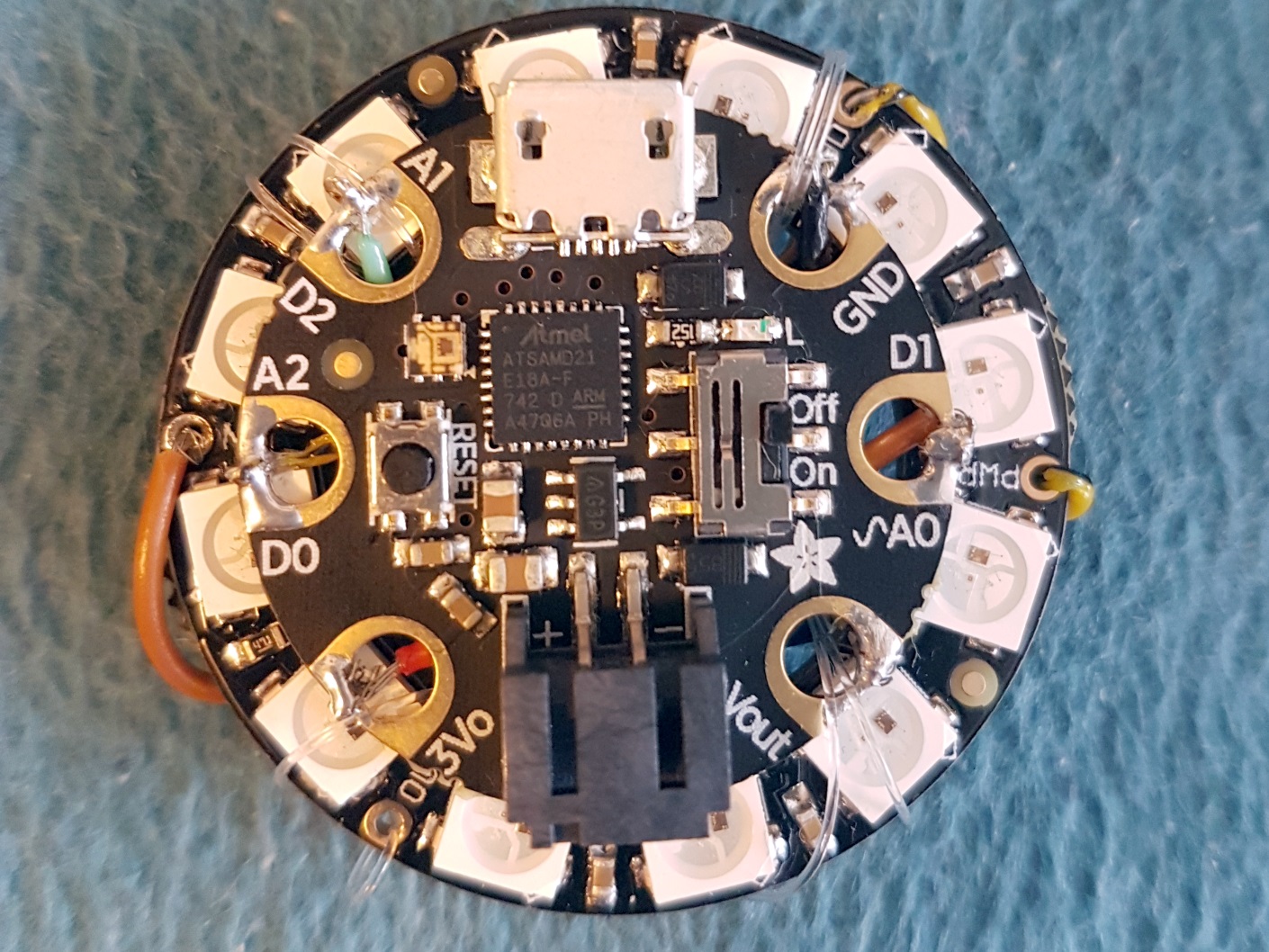
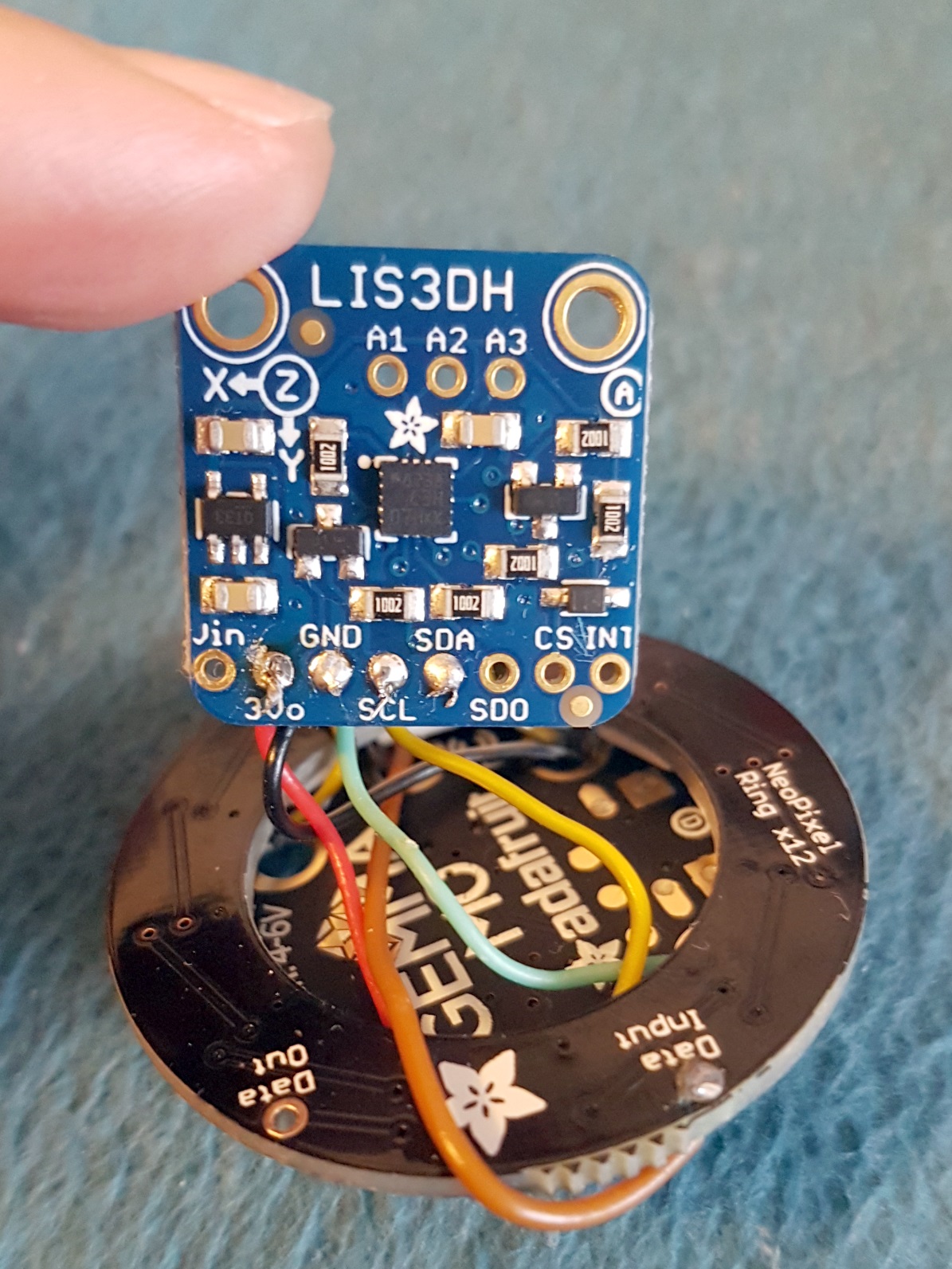
Using the microcontroller board Gemma M0 from Adafruit my daughter and I are simulating gravity on the LEDs of the NeoPixel Ring using an accelerometer LIS3DH. The LEDs will light on, following the inclination of the board:

If you hold the board completely vertical and you rotate it, the LEDs will light on individually, changing their color as the board rotates.
Here are two videos, showing how it works:
Materials:
LiPo Battery 3.7V 150mAh:

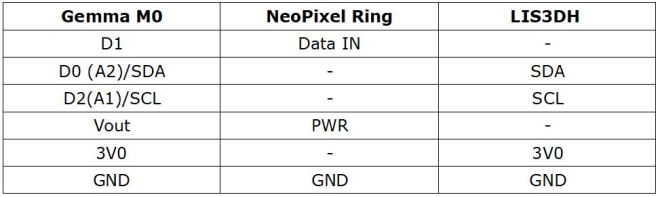
Connections:
Code:
/******************************************************************************************** * The Gemma M0 needs the Adafruit SAMD (32-bits ARM Cortex-M0+ and Cortex-M4) Boards Library. * It uses the AVRISP mkII programmer. * double clik on the Gemma M0 Reset button TWICE before uploading the programm!! * download following libraries: Wire, Adafruit_Sensor, Adafruit_NeoPixel for the NeoPixel Ring * and Adafruit_LIS3DH for the accelerometer * https://mstronik.blog/2019/03/09/gemma-m0-lis3dh-accelerometer */#include <Wire.h>#include <Adafruit_LIS3DH.h>#include <Adafruit_NeoPixel.h>#include <Adafruit_Sensor.h>// ************** Define some colors ****************#define RED 0xff0000#define YELLOW 0xffff00#define GREEN 0x00ff00#define BLUE 0x0000ff#define VIOLET 0xff00ff#define WHITE 0xffffff #define ACCEL_ADDR 0x18 // Accelerometer I2C address#define NEO_PIN 1#define NUM_LEDS 12#define Array_size 50uint32_t color = 0x008080; //teal colorint16_t ac_x,ac_y,ac_z;int16_t Lis_Read_X[Array_size],Lis_Read_Y[Array_size],Lis_Read_Z[Array_size];int Status; Adafruit_NeoPixel MVpixels = Adafruit_NeoPixel(NUM_LEDS, NEO_PIN); // I2CAdafruit_LIS3DH accel = Adafruit_LIS3DH();//********************** SETUP **************************************void setup(void) {uint8_t i; Wire.setClock(400000); // Run I2C at 400 KHz for faster screen updates MVpixels.begin(); MVpixels.clear(); MVpixels.setBrightness(20);// set not too bright! // Serial.begin(9600); if(!accel.begin(ACCEL_ADDR)) // Init accelerometer. If it fails LED blinks to alert { pinMode(LED_BUILTIN, OUTPUT); for(i=1;;i++) { digitalWrite(LED_BUILTIN, i & 1); // toggle LED delay(250); } } accel.setRange(LIS3DH_RANGE_4_G); // 4G! Status = 10; }//************************ FUNCTION find average *************int16_t find_average(int16_t Readings[]){ int16_t min_value,max_value, av; uint8_t i; max_value = Readings[0]; min_value = Readings[0]; for (i=1; i<Array_size; i++){ if (Readings[i]> max_value) max_value = Readings[i]; if (Readings[i]< min_value) min_value = Readings[i]; } av = (max_value + min_value)/2; return (av);}//************************** MAIN ***********************************void loop() { uint8_t i; // accel.read(); // get X Y and Z data at once //******************** average data ***************** for (i=0; i< Array_size; i++) { accel.read(); Lis_Read_X[i]= accel.x; Lis_Read_Y[i]= accel.y; Lis_Read_Z[i]= accel.z; } ac_x = find_average(Lis_Read_X); ac_y = find_average(Lis_Read_Y); ac_z = find_average(Lis_Read_Z); /*ac_x = accel.x; ac_y = accel.y; ac_z = accel.z;*/ // *************** Transform accelerometer axes ************ ac_x = -ac_x / 256; ac_y = -ac_y / 256; ac_z = ac_z / 256; //print out data /* Serial.print("X: "); Serial.print(ac_x); Serial.print(" \tY: "); Serial.print(ac_y); Serial.print(" \tZ: "); Serial.print(ac_z); Serial.println();*/ //************************* find Status *************************************//********************* check Status from horizontal position ***************if ((ac_z < 9)&&(ac_z > -9)) vertical(ac_x,ac_y);else{ if ((Status == 10)&&(ac_x > 7)) Status = 16; else if ((Status == 10)&&(ac_x < -7)) Status = 36; else if ((Status == 10)&&(ac_y > 7)) Status = 46; else if ((Status == 10)&&(ac_y < -7)) Status = 26; //************************ check Status RIGHT ******************** else if ((Status == 16)&&(ac_x <= 7)) Status = 10; else if ((Status == 16)&&(ac_x > 11)) Status = 15; else if ((Status == 15)&&(ac_x <= 11)) Status = 16; else if ((Status == 15)&&(ac_x > 19)) Status = 13; else if ((Status == 13)&&(ac_x <= 19)) Status = 15; else if ((Status == 13)&&(ac_x > 25)) Status = 11; else if ((Status == 11)&&(ac_x <= 25)) Status = 13;//******************** check Status UP ******************** else if ((Status == 46)&&(ac_y <= 7)) Status = 10; else if ((Status == 46)&&(ac_y > 11)) Status = 45; else if ((Status == 45)&&(ac_y <= 11)) Status = 46; else if ((Status == 45)&&(ac_y > 19)) Status = 43; else if ((Status == 43)&&(ac_y <= 19)) Status = 45; else if ((Status == 43)&&(ac_y > 25)) Status = 41; else if ((Status == 41)&&(ac_y <= 25)) Status = 43;//****************** check Status LEFT ********************** else if ((Status == 36)&&(ac_x >= -7)) Status = 10; else if ((Status == 36)&&(ac_x < -11)) Status = 35; else if ((Status == 35)&&(ac_x >= -11)) Status = 36; else if ((Status == 35)&&(ac_x < -19)) Status = 33; else if ((Status == 33)&&(ac_x >= -19)) Status = 35; else if ((Status == 33)&&(ac_x < -25)) Status = 31; else if ((Status == 31)&&(ac_x >= -25)) Status = 33;//***************** check Status DOWN ****************** else if ((Status == 26)&&(ac_y >= -7)) Status = 10; else if ((Status == 26)&&(ac_y < -11)) Status = 25; else if ((Status == 25)&&(ac_y >= -11)) Status = 26; else if ((Status == 25)&&(ac_y < -19)) Status = 23; else if ((Status == 23)&&(ac_y >= -19)) Status = 25; else if ((Status == 23)&&(ac_y < -25)) Status = 21; else if ((Status == 21)&&(ac_y >= -25)) Status = 23; //************* run Status ******************* run_status(Status); } //delay(500);}// *********************FUNCTIONS *****************************************************// ********* run status **************************void run_status(int ac_status){switch (ac_status) { case 10: horizontal(); break; case 11: right_1(); break; case 13: right_3(); break; case 15: right_5(); break; case 16: right_6(); break; case 21: down_1(); break; case 23: down_3(); break; case 25: down_5(); break; case 26: down_6(); break; case 31: left_1(); break; case 33: left_3(); break; case 35: left_5(); break; case 36: left_6(); break; case 41: up_1(); break; case 43: up_3(); break; case 45: up_5(); break; case 46: up_6(); break; } }//**************** turn on all LEDs - Horizontal *************************void horizontal(){ uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, color); } MVpixels.show(); }//**************** turn on 6 LEDS right *******************void right_6(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, color); if((i>3)&&(i<9)) MVpixels.setPixelColor(i, 0); } MVpixels.show(); }//**************** turn on 5 LEDS right *******************void right_5(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, color); if((i>=3)&&(i<10)) MVpixels.setPixelColor(i, 0); } MVpixels.show(); }//**************** turn on 3 LEDS right *******************void right_3(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i==0)||(i==1)||(i==11)) MVpixels.setPixelColor(i, color); } MVpixels.show(); }//**************** turn on 1 LED right *******************void right_1(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if(i==0) MVpixels.setPixelColor(i, color); } MVpixels.show(); } //**************** turn on 6 LEDS left *******************void left_6(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i>=3)&&(i<10)) MVpixels.setPixelColor(i, color); } MVpixels.show(); } //**************** turn on 5 LEDS left *******************void left_5(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i>=4)&&(i<9)) MVpixels.setPixelColor(i, color); } MVpixels.show(); } //**************** turn on 3 LEDS left *******************void left_3(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i>=5)&&(i<8)) MVpixels.setPixelColor(i, color); } MVpixels.show(); } //**************** turn on 1 LED left *******************void left_1(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if(i==6) MVpixels.setPixelColor(i, color); } MVpixels.show(); } //**************** turn on 6 LEDS UP *******************void up_6(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, color); if((i>=1)&&(i<6)) MVpixels.setPixelColor(i,0); } MVpixels.show(); } //**************** turn on 5 LEDS UP *******************void up_5(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i>=7)&&(i<NUM_LEDS)) MVpixels.setPixelColor(i,color); } MVpixels.show(); } //**************** turn on 3 LEDS UP *******************void up_3(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i>=8)&&(i<11)) MVpixels.setPixelColor(i,color); } MVpixels.show(); }//**************** turn on 1 LED UP *******************void up_1(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if(i==9) MVpixels.setPixelColor(i,color); } MVpixels.show(); } //**************** turn on 6 LEDS DOWN *******************void down_6(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i>=0)&&(i<7)) MVpixels.setPixelColor(i,color); } MVpixels.show(); } //**************** turn on 5 LEDS DOWN *******************void down_5(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i>=1)&&(i<6)) MVpixels.setPixelColor(i,color); } MVpixels.show(); } //**************** turn on 3 LEDS DOWN *******************void down_3(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if((i>=2)&&(i<5)) MVpixels.setPixelColor(i,color); } MVpixels.show(); } //**************** turn on 1 LED DOWN *******************void down_1(){uint8_t i; for (i=0; i<NUM_LEDS; i++) { MVpixels.setPixelColor(i, 0); if(i==3) MVpixels.setPixelColor(i,color); } MVpixels.show(); } //************************* if the board is vertical (Z= 0), turn on only 1 LED at the time ********************void vertical(int16_t ax, int16_t ay){int16_t value_1,value_2,value_3,value_4; MVpixels.clear(); value_1 = 7; value_2 = 11; value_3 = 19; value_4 = 25; ax = filter_axis(ax); ay = filter_axis(ay); if ((ax == 0)&&(ay == value_4)){ MVpixels.setPixelColor(9,RED); MVpixels.show(); } if ((ax == value_2)&&(ay == value_3)){ MVpixels.setPixelColor(10, YELLOW); MVpixels.show(); } if ((ax == value_3)&&(ay == value_2)){ MVpixels.setPixelColor(11, GREEN); MVpixels.show(); } if ((ax == value_4)&&(ay == 0)){ MVpixels.setPixelColor(0, BLUE); MVpixels.show(); } if ((ax == value_3)&&(ay == -value_2)){ MVpixels.setPixelColor(1,VIOLET); MVpixels.show(); } if ((ax == value_2)&&(ay == -value_3)){ MVpixels.setPixelColor(2, WHITE); MVpixels.show(); } if ((ax == 0)&&(ay == -value_4)){ MVpixels.setPixelColor(3, RED); MVpixels.show(); } if ((ax == -value_2)&&(ay == -value_3)){ MVpixels.setPixelColor(4, YELLOW); MVpixels.show(); } if ((ax == -value_3)&&(ay == -value_2)){ MVpixels.setPixelColor(5, GREEN); MVpixels.show(); } if ((ax == -value_4)&&(ay == 0)){ MVpixels.setPixelColor(6,BLUE); MVpixels.show(); } if ((ax == -value_3)&&(ay == value_2)){ MVpixels.setPixelColor(7, VIOLET); MVpixels.show(); } if ((ax == -value_2)&&(ay == value_3)){ MVpixels.setPixelColor(8, WHITE); MVpixels.show(); } } //****************** filter function ***********************************int16_t filter_axis(int16_t ac){ int16_t L_0, L_1, L_2, L_3, L_4,value_1,value_2,value_3,value_4,acxy; L_0 = 7; L_1 = 9; L_2 = 11; L_3 = 19; L_4 = 25; value_1 = 7; value_2 = 11; value_3 = 19; value_4 = 25; if((ac >= -L_0)&&(ac <= L_0)) acxy = 0; if((ac > L_1)&&(ac <= L_2)) acxy = value_1; if((ac > L_2)&&(ac <= L_3)) acxy = value_2; if ((ac > L_3)&&(ac <= L_4)) acxy = value_3; if (ac > L_4) acxy = value_4; if((ac > -L_2)&&(ac < -L_1)) acxy = -1*value_1; if((ac > -L_3)&&(ac <= -L_2)) acxy = -1*value_2; if((ac > -L_4)&&(ac <= -L_3)) acxy = -1*value_3; if (ac <= -L_4) acxy = -1*value_4; return (acxy); }
Or download the code from GitHub:

Hinterlasse einen Kommentar